|
Siddhant Haldar
I am a final year PhD student at the CILVR (Computational Intelligence, Learning, Vision and Robotics)
group at the Courant Institute of Mathematical Sciences, New York University. I work with
Prof. Lerrel Pinto and my research interests lie in the area of generalizable AI, with a
focus on robotics and reinforcement learning. I am currently a research intern at NVIDIA Seattle Robotics Lab.
Previously, I completed an Integrated Bachelor's and Masters Degree in Electrical Engineeing at Indian Institute of Technology (IIT), Kharagpur.
My previous internships include working on multimodal policy learning at Nuro, causal inference at Microsoft Research and IBM Research,
adversarial attacks with Prof. Atul Prakash at MIDAS, University of Michigan, and multimodal object detection with Prof. Zheng Liu at ISDPRL Lab, University of British Columbia. My Master's
thesis was on the topic of action quality assessment (AQA) with Prof. Brendan Morris at RTIS Lab, University of Nevada, Las Vegas. I did my Bachelor's thesis
on the topic of attention-guided video inpainting with Dr. Avisek Lahiri and Prof. Pabitra Mitra at IIT Kharagpur. I also worked on developing
the perception and control system modules for self-driving cars at the Autonomous Ground Vehicle Lab, IIT Kharagpur under the supervision of Prof. Debashis Chakravarty. In my spare time, I enjoy hiking, reading and traveling.
Email /
CV /
Google Scholar /
Twitter /
Github
|

|
* denotes equal contribution
|
|
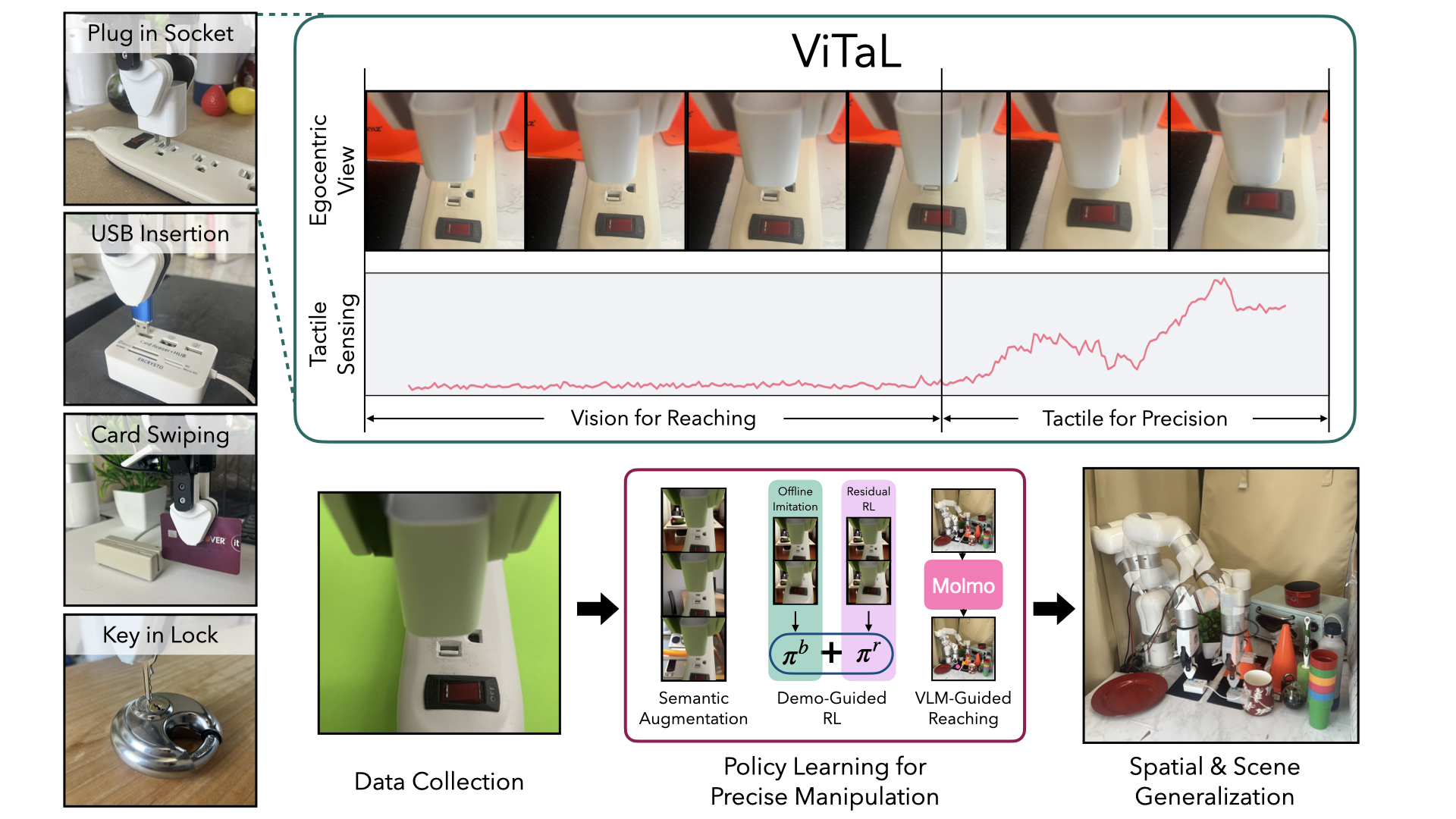
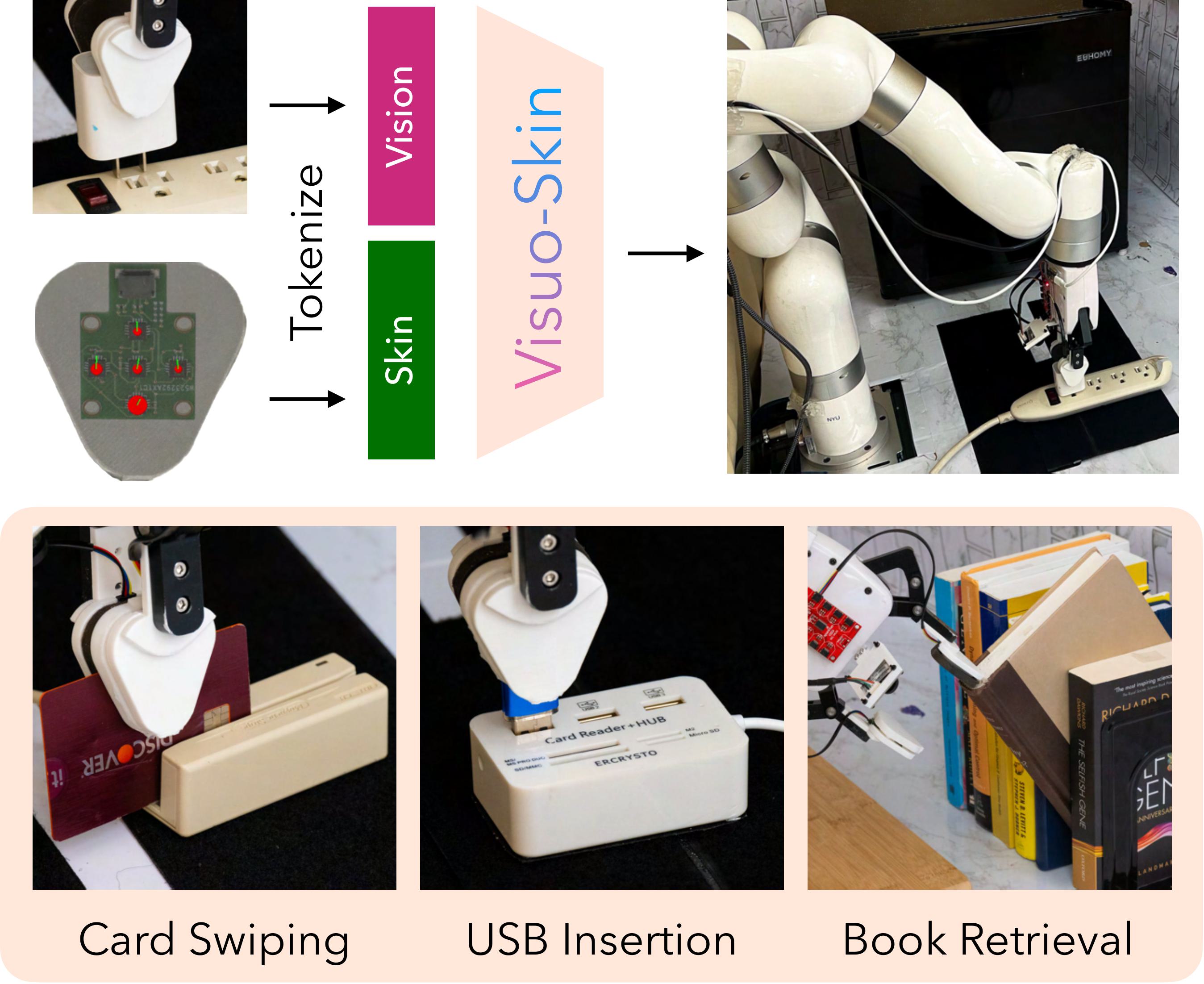
Touch begins where vision ends: Generalizable policies for contact-rich manipulation
Zifan Zhao,
Siddhant Haldar,
Jinda Cui,
Lerrel Pinto,
Raunaq Bhirangi
RSS 2025 Workshop on Out-of-Distribution Generalization in Robotics
RSS 2025 Workshop on Dexterous Manipulation
project page
/
arXiv
/
code
|
|
|
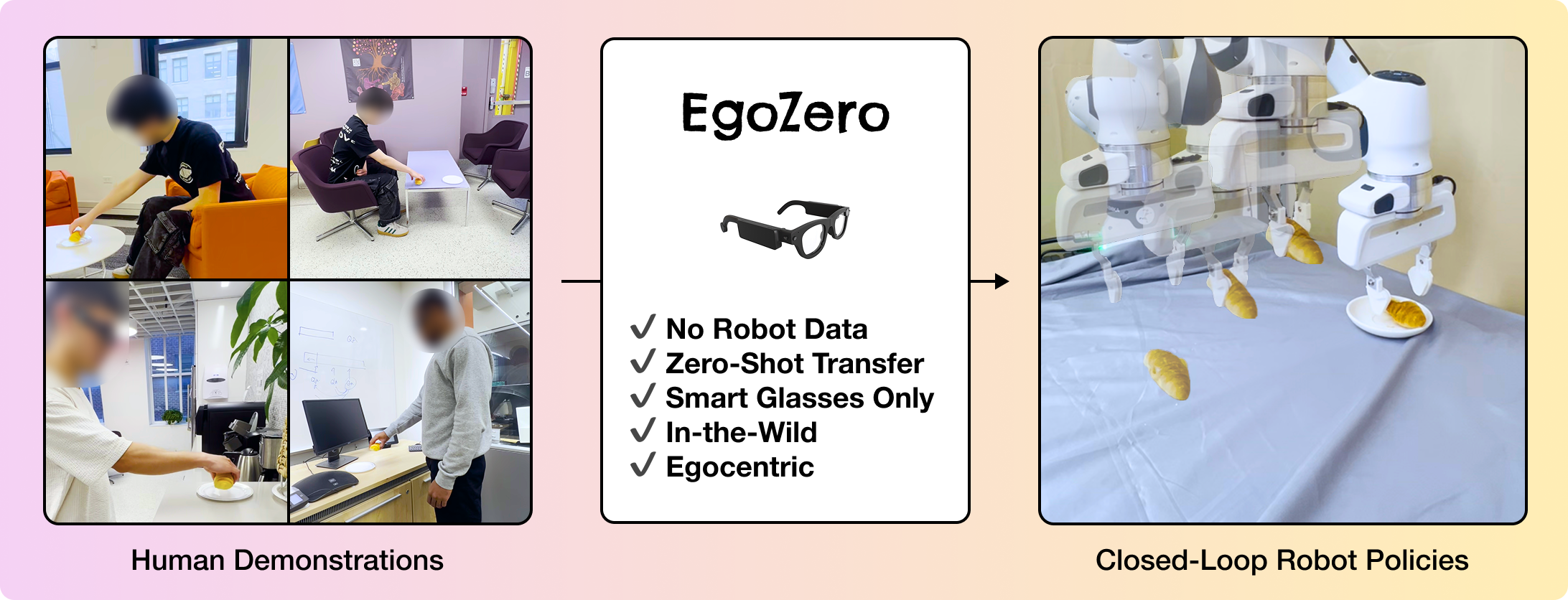
EgoZero: Robot Learning from Smart Glasses
Vincent Liu*,
Ademi Adeniji*,
Haotian Zhan*,
Siddhant Haldar,
Raunaq Bhirangi,
Pieter Abbeel,
Lerrel Pinto
RSS 2025 Workshop on Learned Robot Representations
project page
/
arXiv
/
code
|
|
|
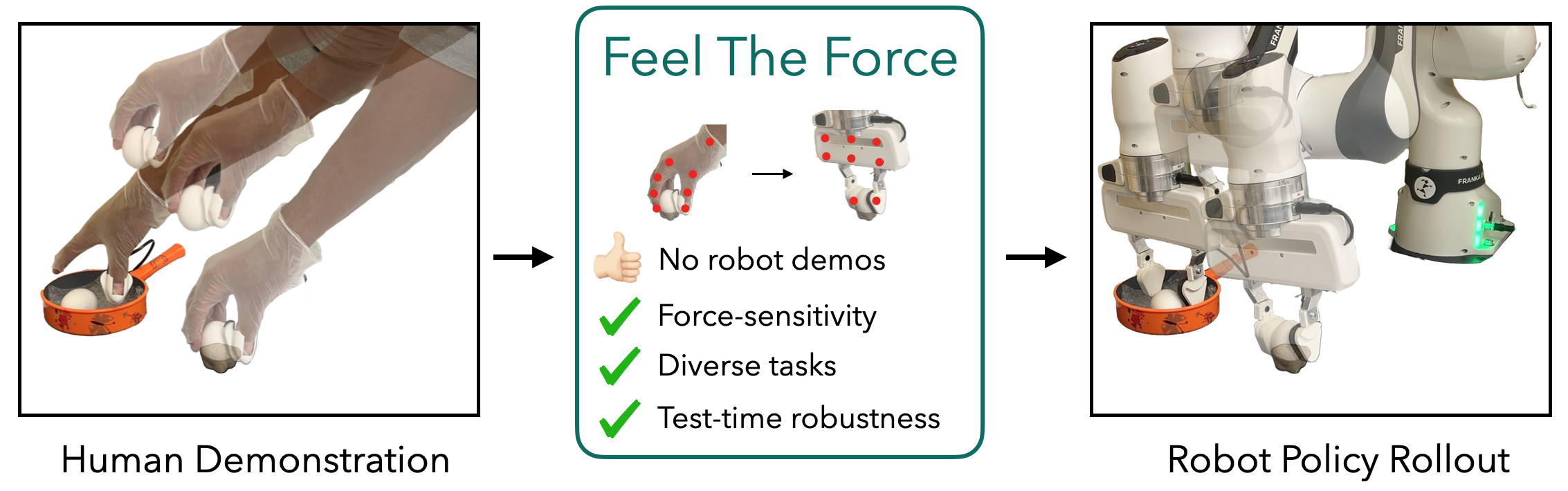
Feel The Force: Contact-Driven Learning from Humans
Ademi Adeniji*,
Zhuoran Chen*,
Vincent Liu,
Venkatesh Pattabiraman,
Siddhant Haldar,
Raunaq Bhirangi,
Pieter Abbeel,
Lerrel Pinto
RSS 2025 Workshop on Learned Robot Representations
project page
/
arXiv
/
code
|
|
|
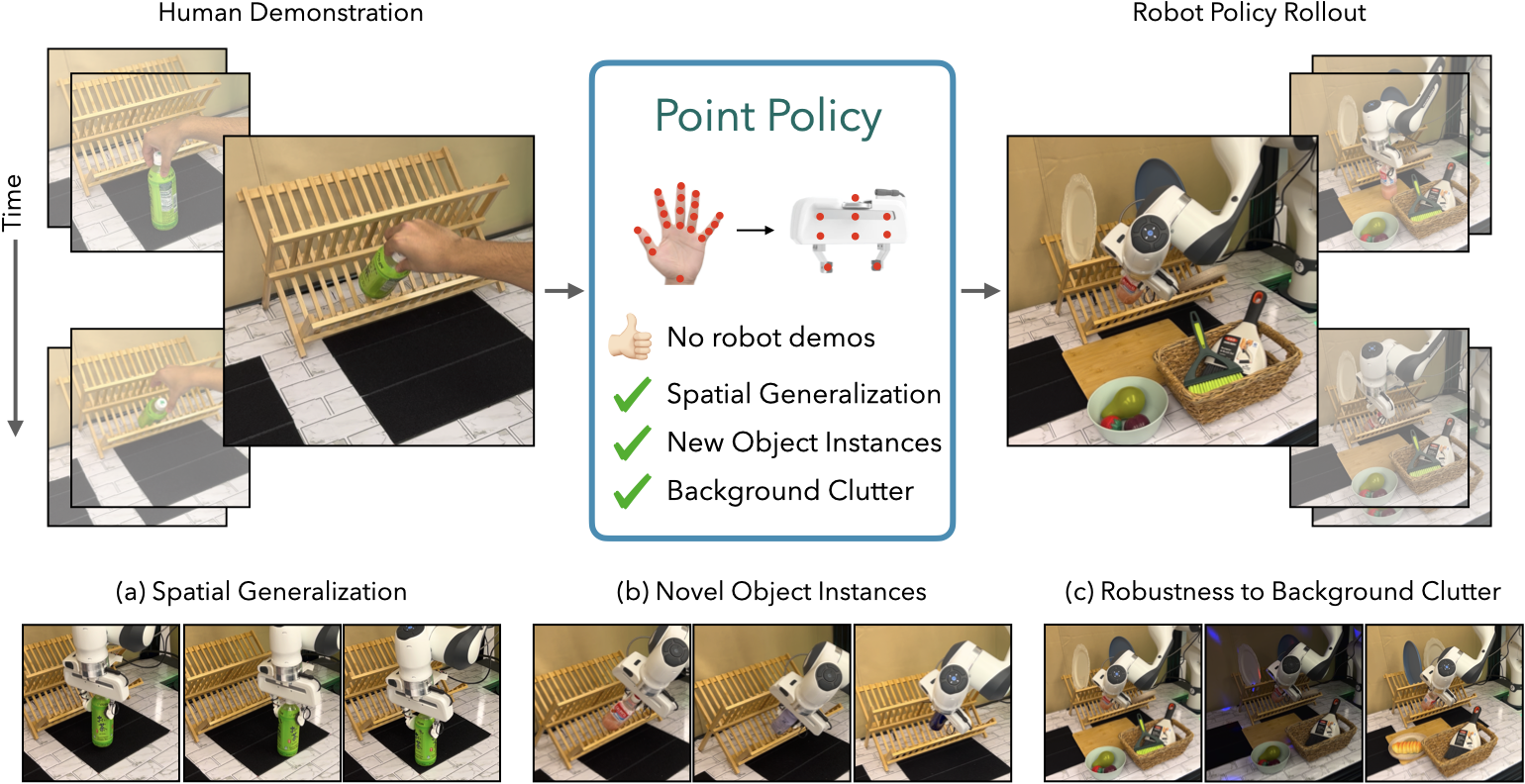
Point Policy: Unifying Observations and Actions with Key Points for Robot Manipulation
Siddhant Haldar,
Lerrel Pinto,
CoRL 2025
RSS 2025 Workshop on Out-of-Distribution Generalization in Robotics
RSS 2025 Workshop on Reasoning for Robust Robot Manipulation in the Open World
project page
/
arXiv
/
code
/
data
|
|
|
Learning Precise, Contact-Rich Manipulation through Uncalibrated Tactile Skins
Venkatesh Pattabiraman*,
Yifeng Cao,
Siddhant Haldar,
Lerrel Pinto,
Raunaq Bhirangi*
ICRA 2025 ViTac Workshop 2025 (Best Poster Award)
project page
/
arXiv
/
code
|
|
|
P3-PO: Prescriptive Point Priors for Visuo-Spatial Generalization of Robot Policies
Mara Levy,
Siddhant Haldar,
Lerrel Pinto,
Abhinav Shrivastava
ICRA 2025
project page
/
arXiv
/
code
|
|
|
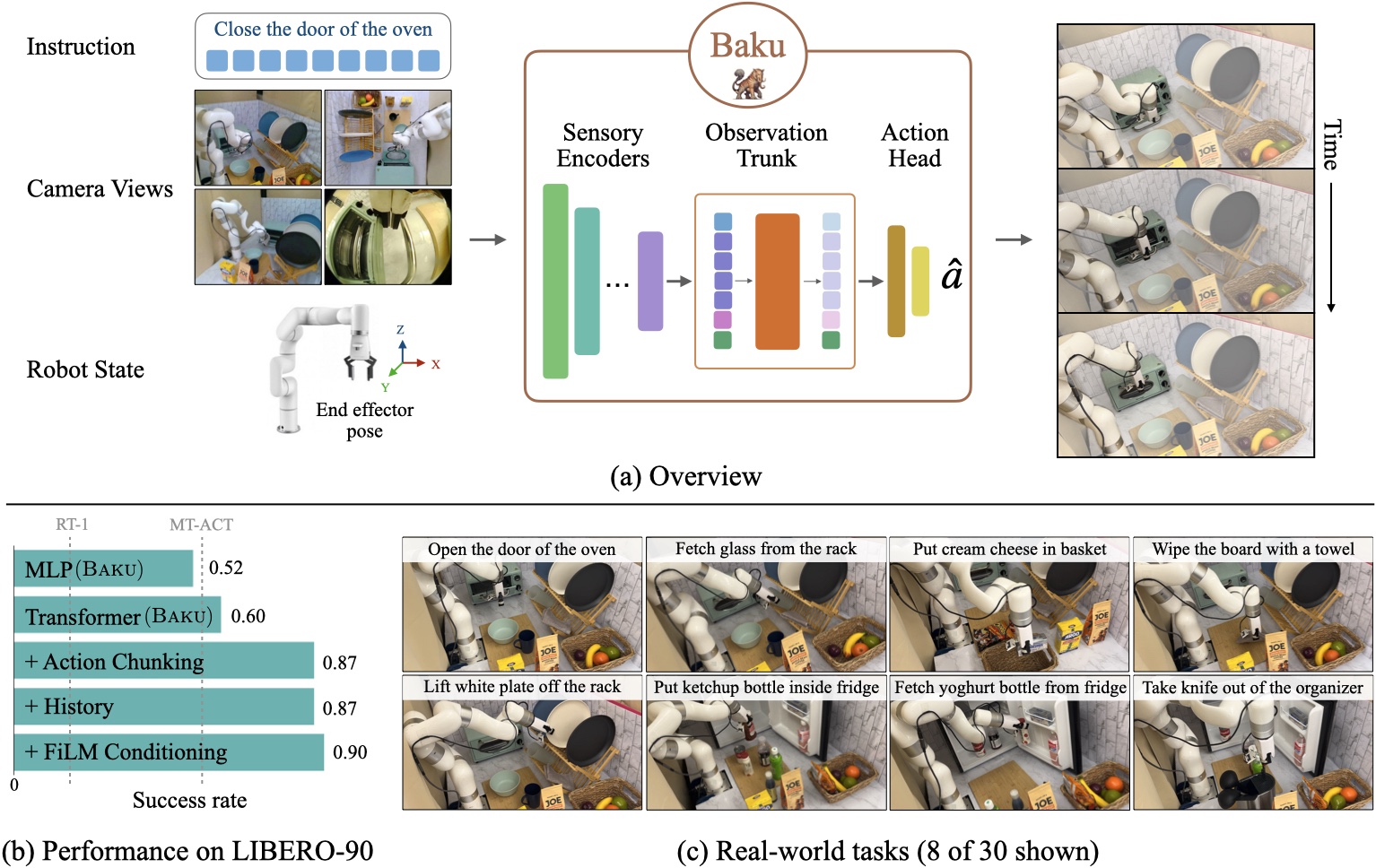
BAKU: An Efficient Transformer for Multi-Task Policy Learning
Siddhant Haldar,
Zhuoran Peng,
Lerrel Pinto
NeurIPS 2024
project page
/
arXiv
/
code
|
|
|
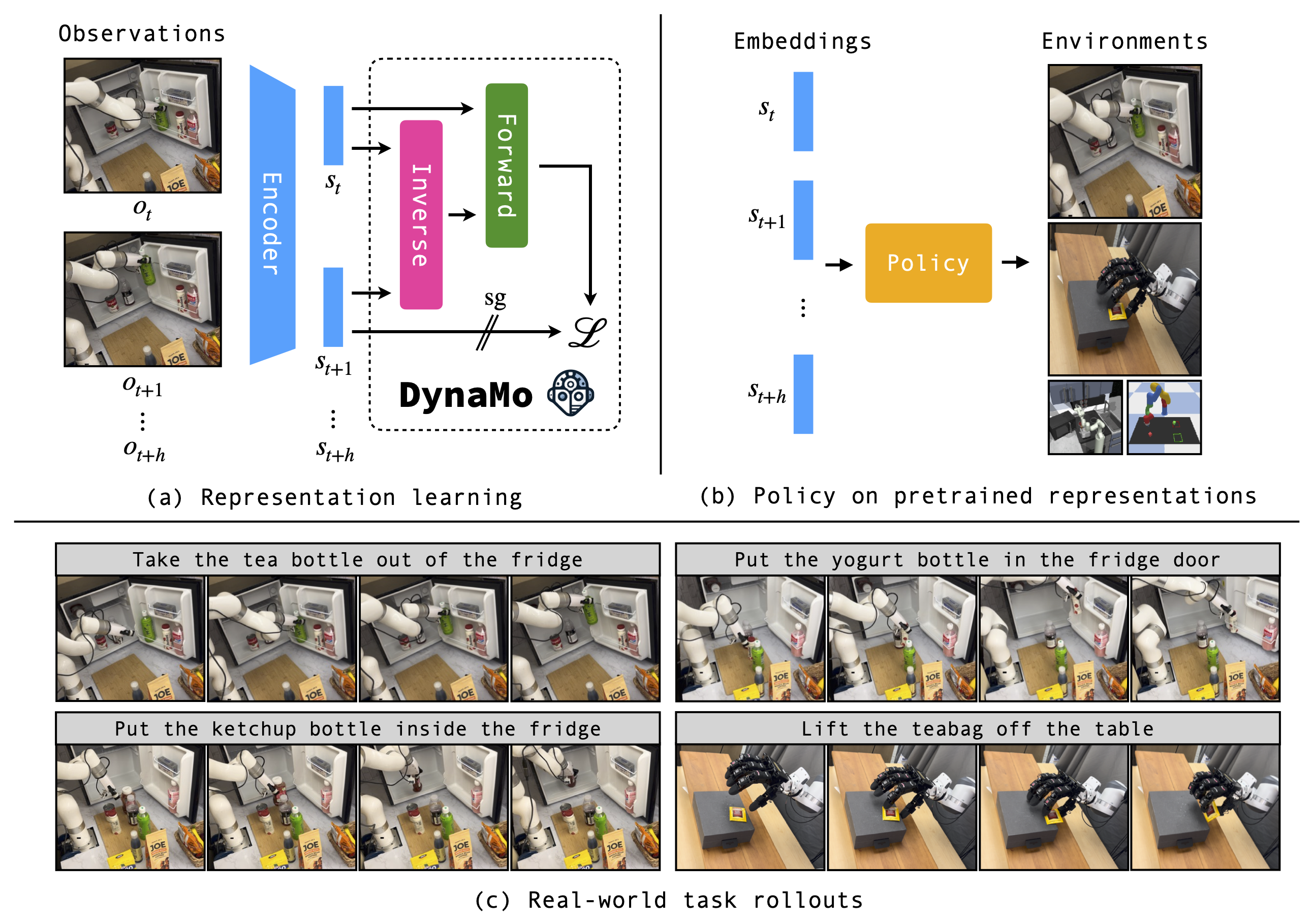
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control
Zichen Jeff Cui,
Hengkai Pan,
Aadhithya Iyer,
Siddhant Haldar,
Lerrel Pinto
NeurIPS 2024
project page
/
arXiv
/
code
|
|
|
OPEN TEACH: A Versatile Teleoperation System for Robotic Manipulation
Aadhithya Iyer,
Zhuoran Peng,
Yinlong Dai,
Irmak Guzey,
Siddhant Haldar,
Soumith Chintala,
Lerrel Pinto
CoRL 2024
project page
/
arXiv
/
code
|
|
|
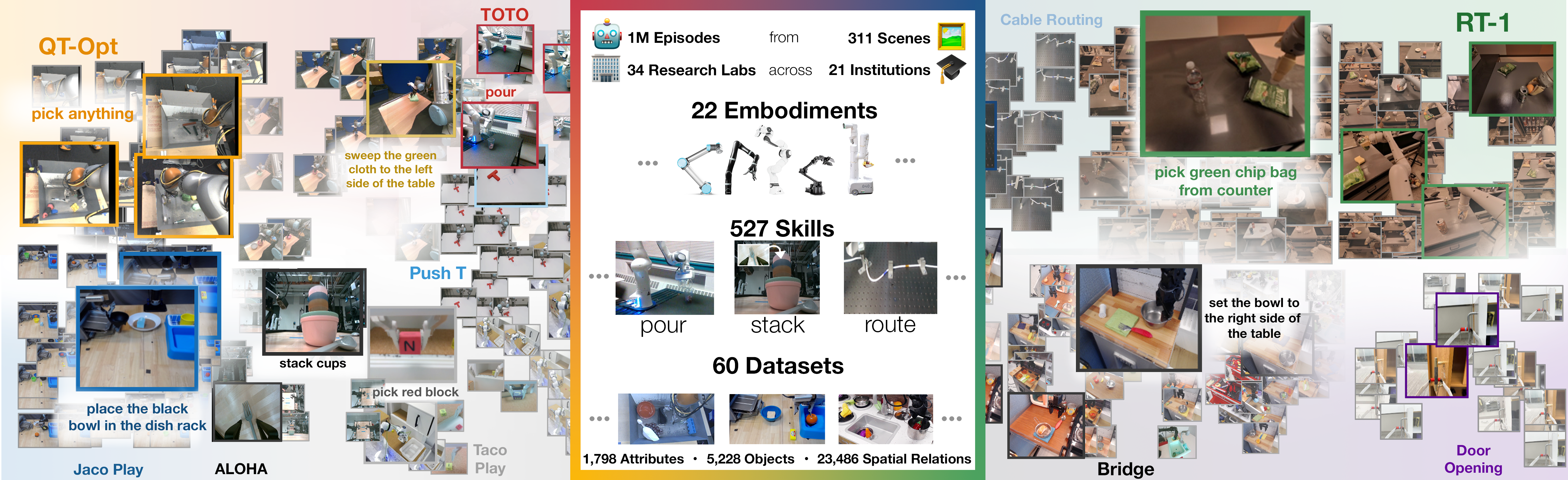
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration,
ICRA 2024 (Best Paper Award)
project page
/
arXiv
/
code
|
|
|
PolyTask: Learning Unified Policies through Behavior Distillation
Siddhant Haldar,
Lerrel Pinto
arXiv
project page
/
arXiv
/
code
|
|
|
Teach a Robot to FISH: Versatile Imitation from One Minute of Demonstrations
Siddhant Haldar*,
Jyothish Pari*,
Anant Rai,
Lerrel Pinto
RSS 2023 (Best Student Paper Award)
project page
/
arXiv
/
paper
/
code
|
|
Watch and Match: Supercharging Imitation with Regularized Optimal Transport
Siddhant Haldar,
Vaibhav Mathur,
Denis Yarats,
Lerrel Pinto
CoRL 2022 (Oral Presentation, Best Paper Award Finalist)
project page
/
arXiv
/
paper
/
code
|
|
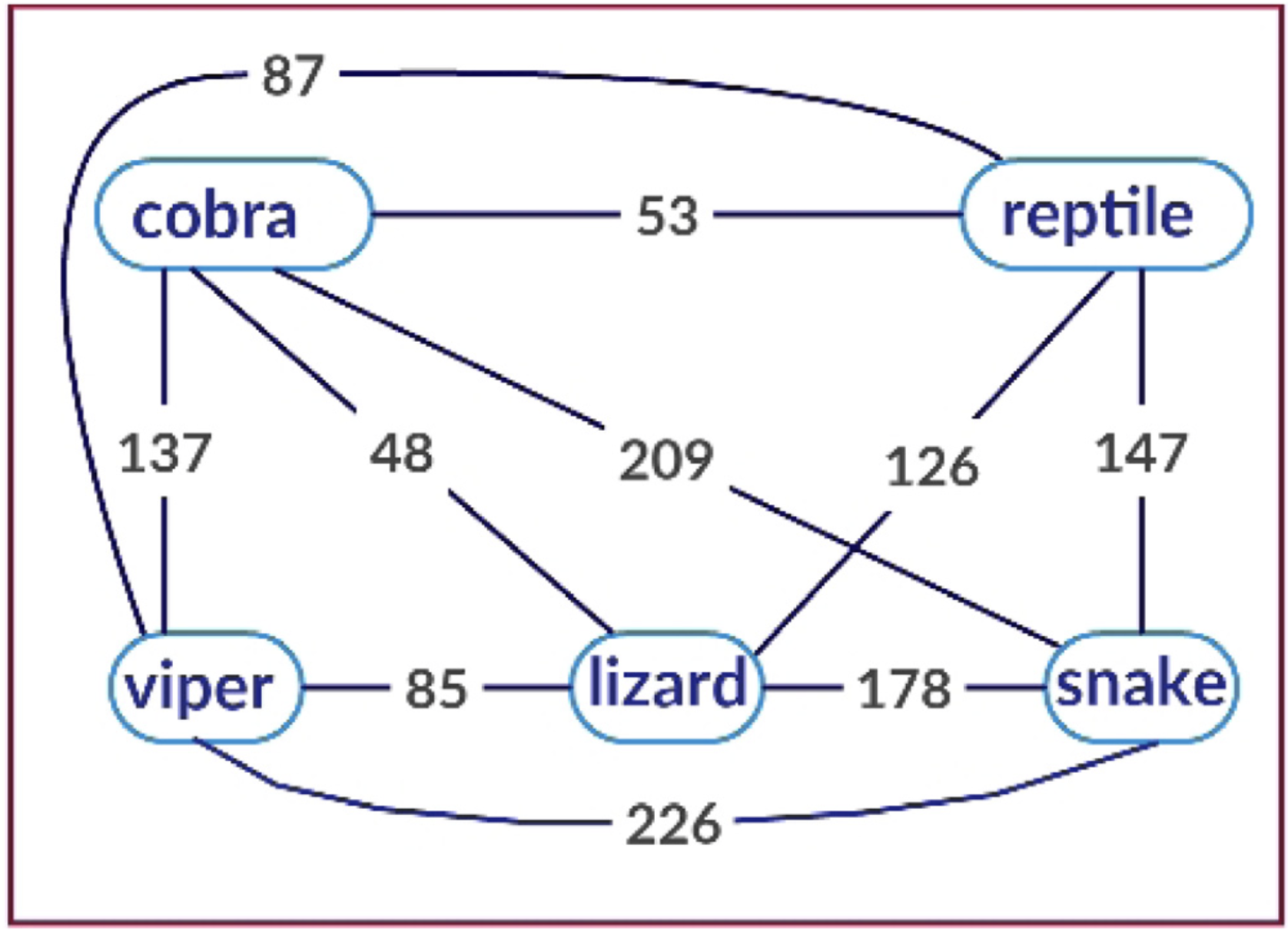
Network Embedding of Distributional Thesaurus Combined with Word Vectors Leads to Better Representation
Abhik Jana,
Siddhant Haldar,
Pawan Goyal
ESWA 2022
paper
|
|
|
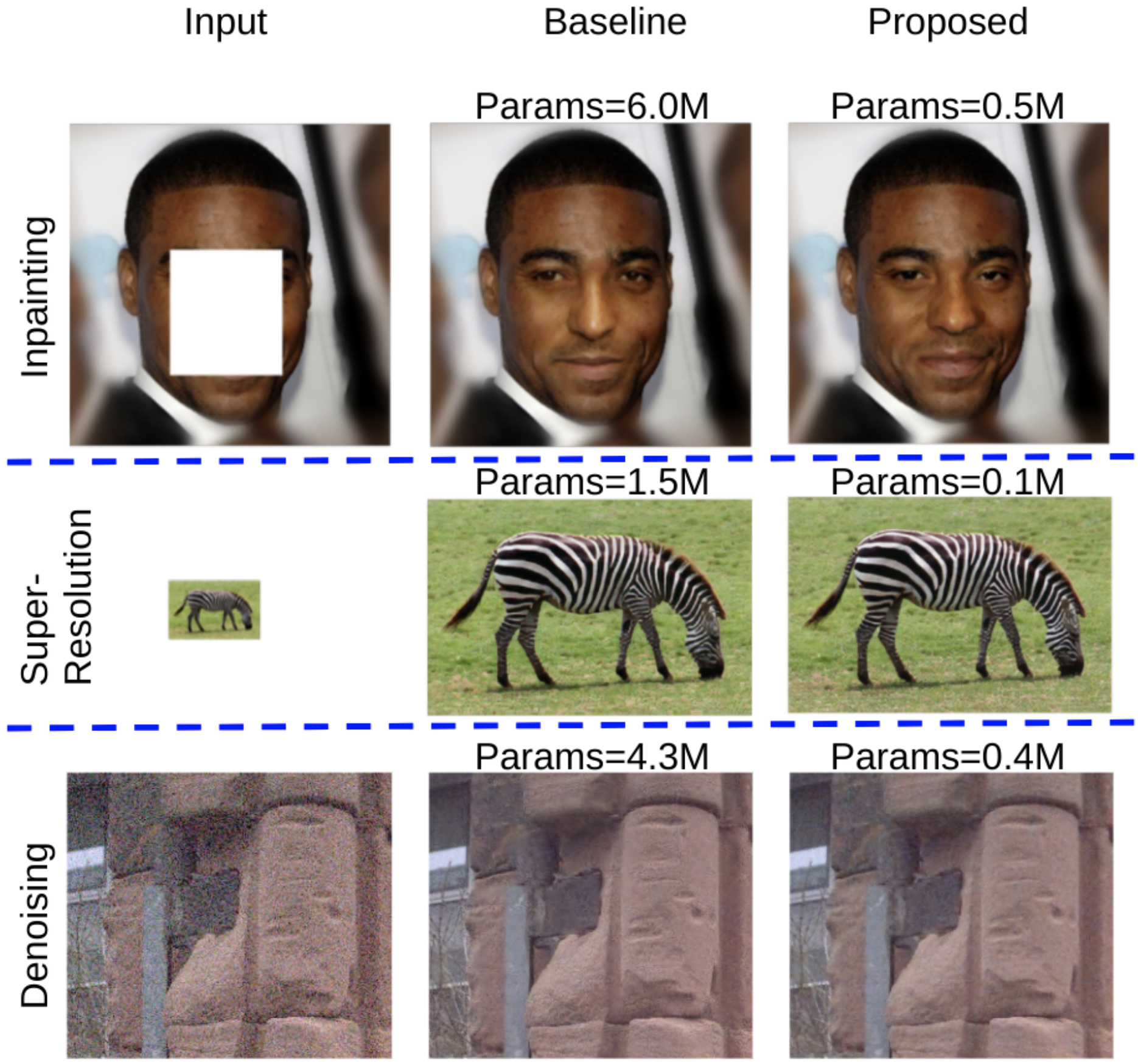
Lightweight Modules for Efficient Deep Learning based Image Restoration
Avisek Lahiri,
Sourav Bairagya,
Sutanu Bera,
Siddhant Haldar,
Prabir Kumar Biswas
TCSVT 2020
arXiv
/
code
|
|
|
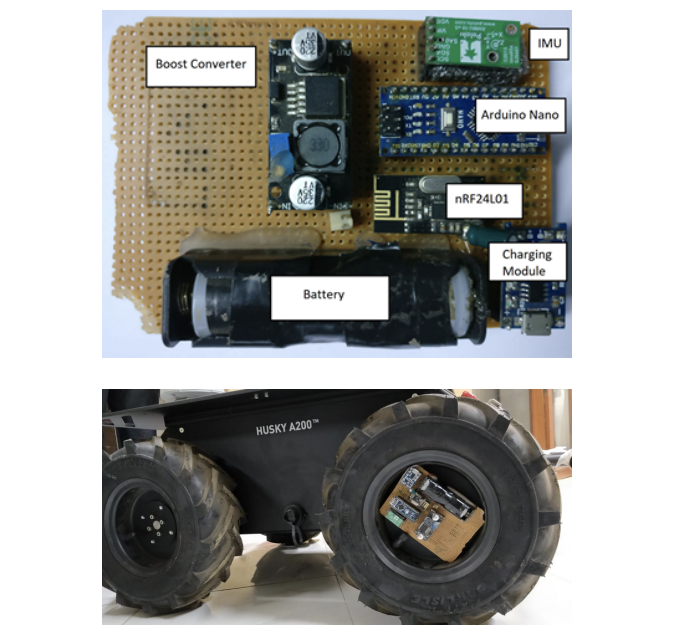
Design and Implementation of Autonomous Ground Vehicle for Constrained Environments
Siddhant Haldar et al
IRC 2019
paper
|
|
Ground Vehicle Odometry using a Non-Intrusive Inertial Speed Sensor
Het Shah*,
Siddhant Haldar*,
Rohit Ner*,
Siddharth Jha*,
Debashish Chakravarty
ICIT 2019
arXiv
|

|
Off-Road Lane Detection Using Superpixel Clustering And RANSAC Curve Fitting
Sanskar Agrawal*,
Indu Kant Deo*,
Siddhant Haldar*,
G. Rahul Krantikiran*,
Debashish Chakravarty
ICARCV 2018
paper
|
|