Siddhant Haldar
I am currently working on a new company in AI/robotics. Before this, I received my PhD from the CILVR Lab at
NYU Courant , where I was advised by Prof. Lerrel Pinto .
My research during the Ph.D. focused on enabling data-efficient generalization for robot manipulation, spanning efficient real-world RL, architectures for offline
learning, and observational priors for sample-efficient generalization. During my Ph.D., I did research internships at the
NVIDIA Seattle Robotics Lab and the Nuro Behavior Team .
Before my Ph.D., I completed an Integrated Bachelor's and Masters Degree in Electrical Engineeing at Indian Institute of Technology (IIT), Kharagpur .
My previous internships include working on multimodal policy learning at Nuro , causal inference at Microsoft Research and IBM Research ,
adversarial attacks with Prof. Atul Prakash at MIDAS, University of Michigan , and multimodal object detection with Prof. Zheng Liu at ISDPRL Lab, University of British Columbia . My Master's
thesis was on the topic of action quality assessment (AQA) with Prof. Brendan Morris at RTIS Lab, University of Nevada, Las Vegas . I did my Bachelor's thesis
on the topic of attention-guided video inpainting with Dr. Avisek Lahiri and Prof. Pabitra Mitra at IIT Kharagpur. I also worked on developing
the perception and control system modules for self-driving cars at the Autonomous Ground Vehicle Lab, IIT Kharagpur under the supervision of Prof. Debashis Chakravarty . In my spare time, I enjoy hiking, reading and traveling.
Email /
CV /
Google Scholar /
Twitter /
Github
* denotes equal contribution
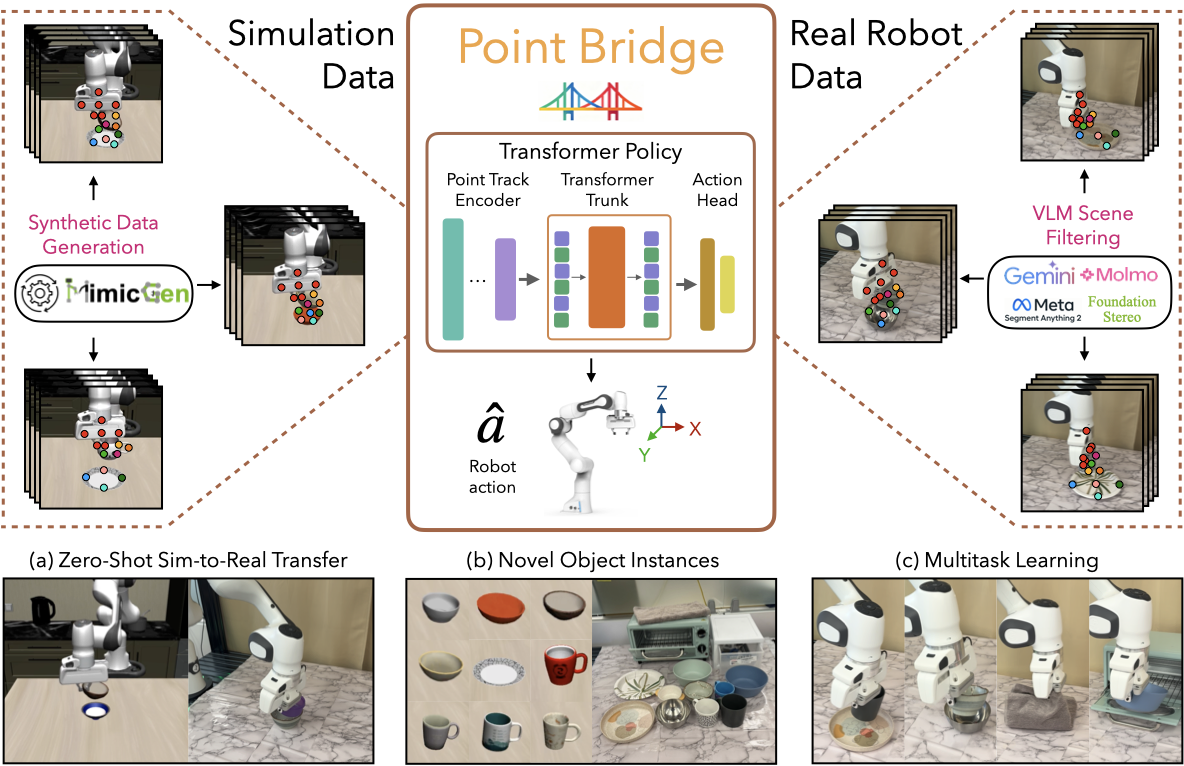
Point Bridge: 3D Representations for Cross Domain Policy Learning
Siddhant Haldar ,
Lars Johannsmeier ,
Lerrel Pinto ,
Abhishek Gupta ,
Dieter Fox ,
Yashraj Narang ,
Ajay Mandlekar ,
ICRA 2026 Workshop on Synthetic Data for Robot Learning
project page
/
arXiv
/
code
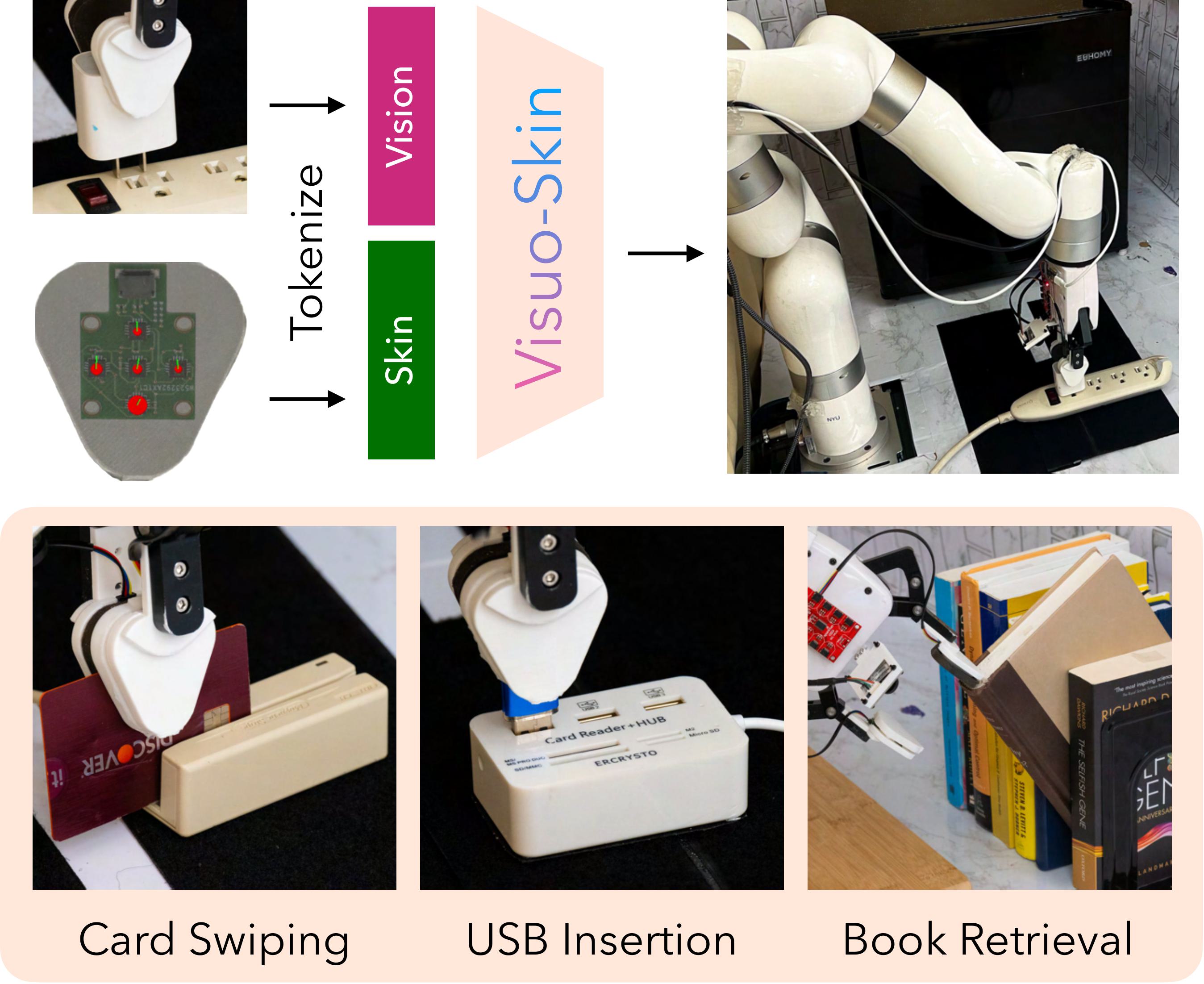
Touch begins where vision ends: Generalizable policies for contact-rich manipulation
Zifan Zhao ,
Siddhant Haldar ,
Jinda Cui ,
Lerrel Pinto ,
Raunaq Bhirangi
RSS 2025 Workshop on Out-of-Distribution Generalization in Robotics
RSS 2025 Workshop on Dexterous Manipulation
project page
/
arXiv
/
code
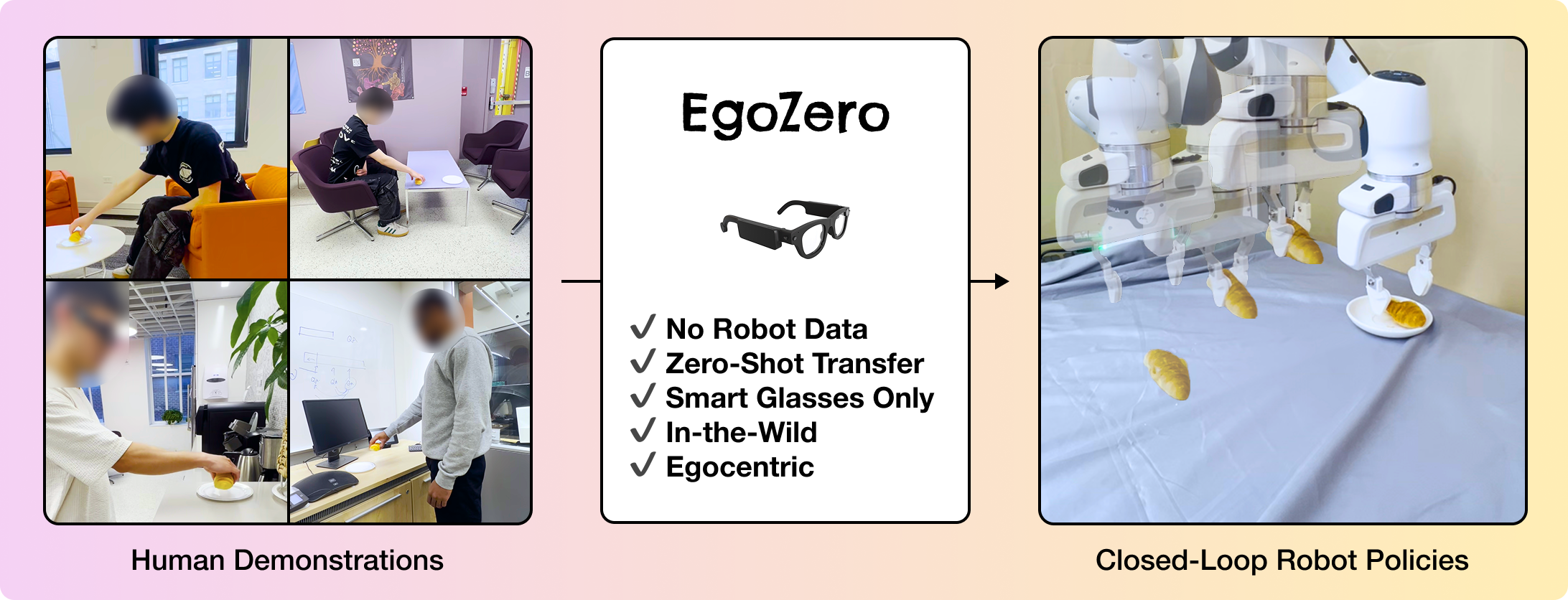
EgoZero: Robot Learning from Smart Glasses
Vincent Liu* ,
Ademi Adeniji* ,
Haotian Zhan* ,
Siddhant Haldar ,
Raunaq Bhirangi ,
Pieter Abbeel ,
Lerrel Pinto
RSS 2025 Workshop on Learned Robot Representations
project page
/
arXiv
/
code
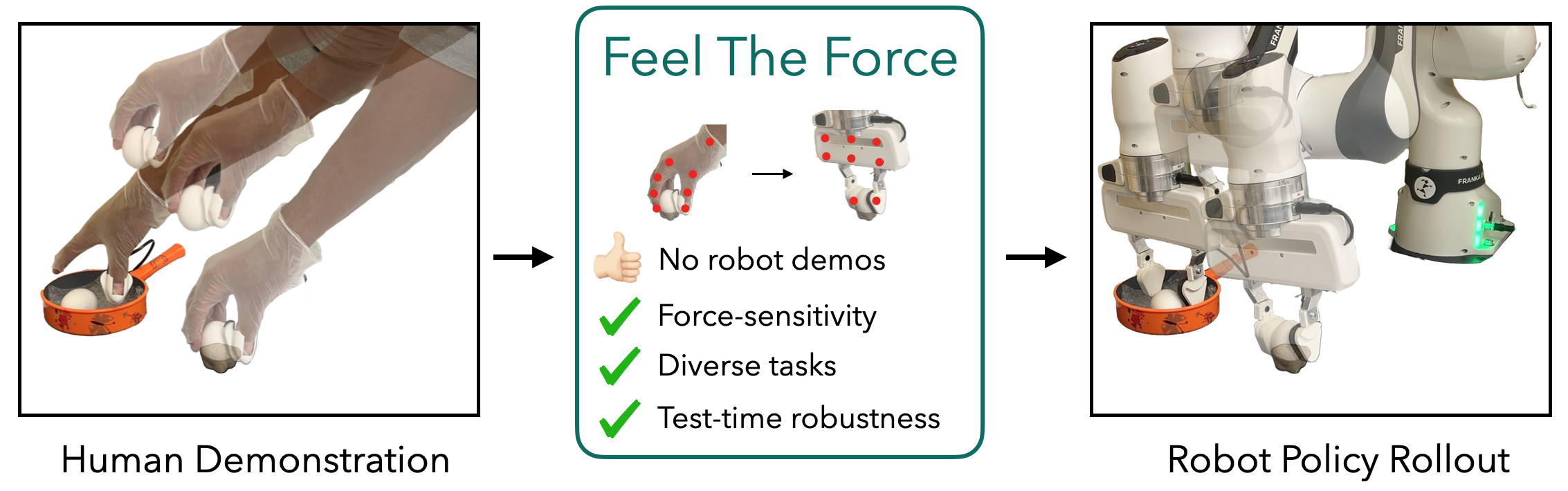
Feel The Force: Contact-Driven Learning from Humans
Ademi Adeniji* ,
Zhuoran Chen* ,
Vincent Liu ,
Venkatesh Pattabiraman ,
Siddhant Haldar ,
Raunaq Bhirangi ,
Pieter Abbeel ,
Lerrel Pinto
RSS 2025 Workshop on Learned Robot Representations
project page
/
arXiv
/
code
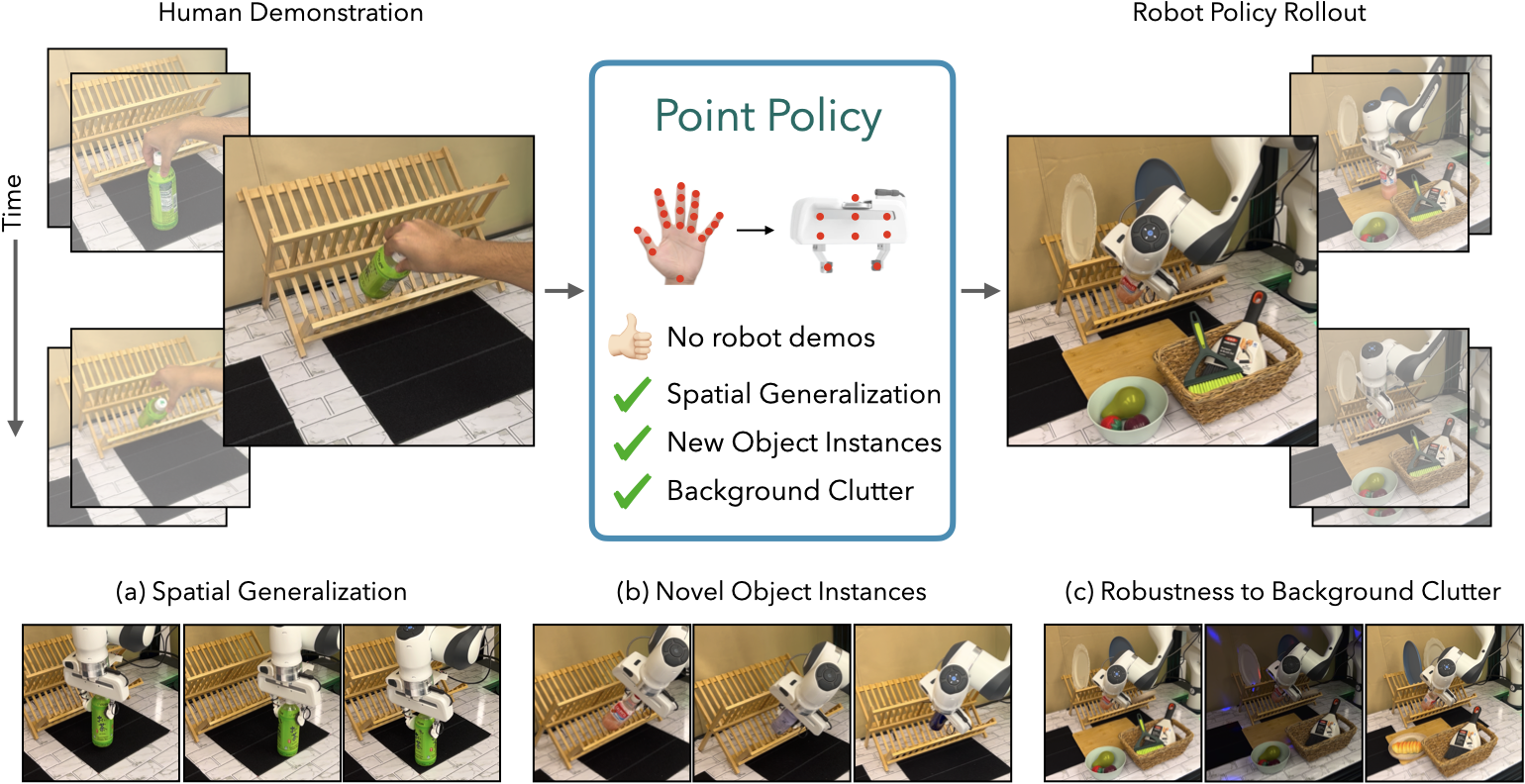
Point Policy: Unifying Observations and Actions with Key Points for Robot Manipulation
Siddhant Haldar ,
Lerrel Pinto ,
CoRL 2025
RSS 2025 Workshop on Out-of-Distribution Generalization in Robotics
RSS 2025 Workshop on Reasoning for Robust Robot Manipulation in the Open World
project page
/
arXiv
/
code
/
data
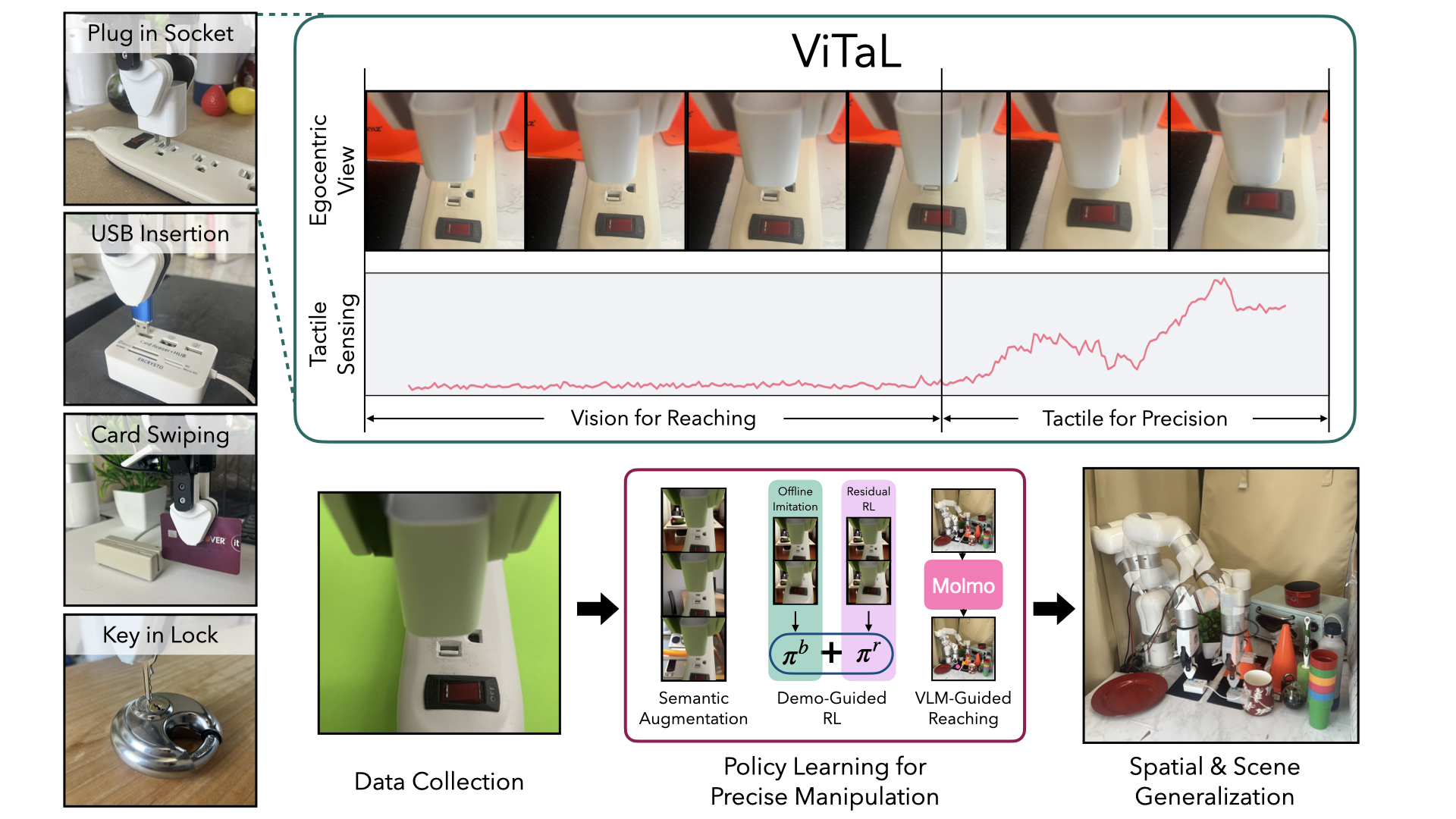
Learning Precise, Contact-Rich Manipulation through Uncalibrated Tactile Skins
Venkatesh Pattabiraman* ,
Yifeng Cao ,
Siddhant Haldar ,
Lerrel Pinto ,
Raunaq Bhirangi*
ICRA 2025 ViTac Workshop 2025 (Best Poster Award)
project page
/
arXiv
/
code
P3-PO: Prescriptive Point Priors for Visuo-Spatial Generalization of Robot Policies
Mara Levy ,
Siddhant Haldar ,
Lerrel Pinto ,
Abhinav Shrivastava
ICRA 2025
project page
/
arXiv
/
code
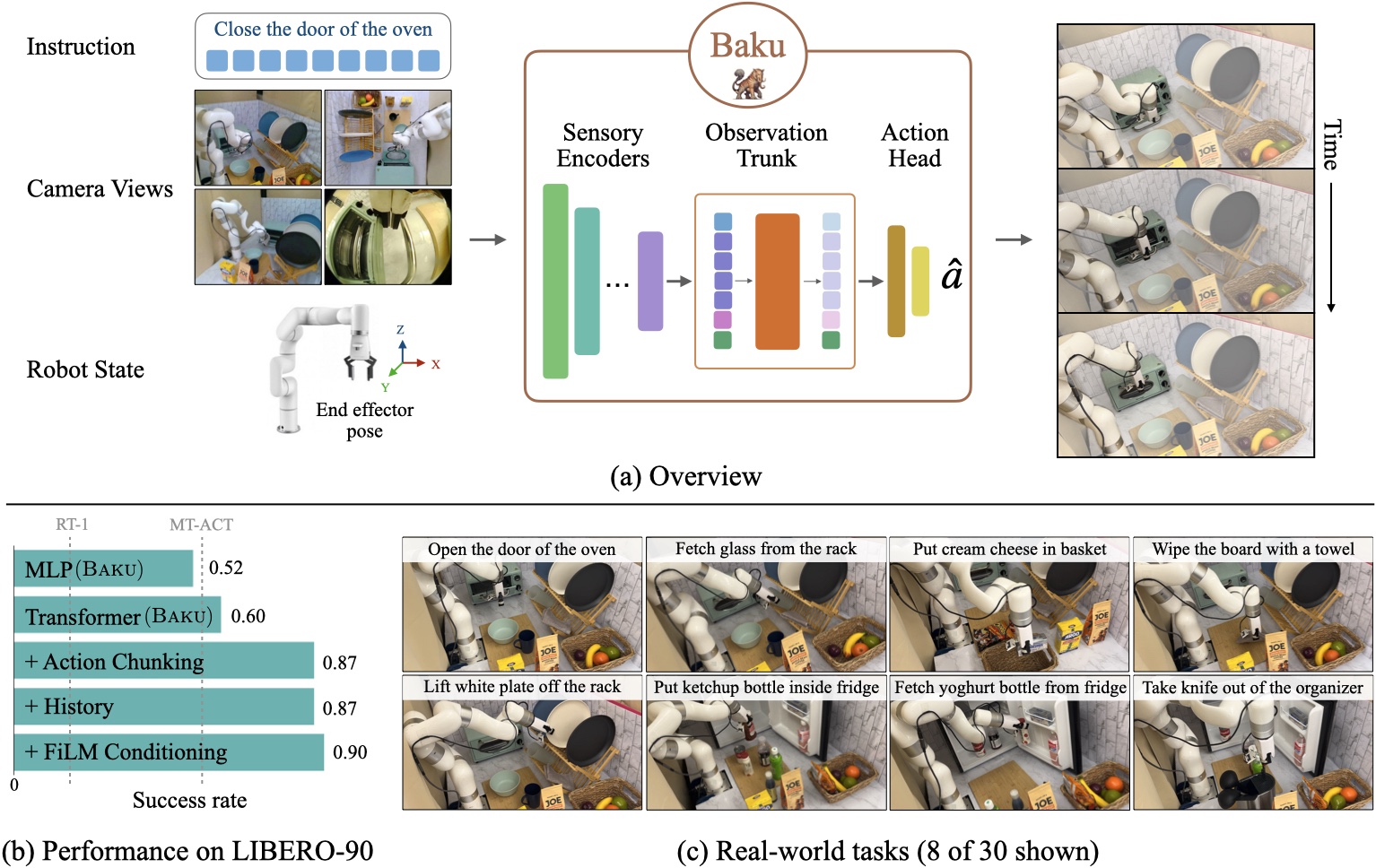
BAKU: An Efficient Transformer for Multi-Task Policy Learning
Siddhant Haldar ,
Zhuoran Peng ,
Lerrel Pinto
NeurIPS 2024
project page
/
arXiv
/
code
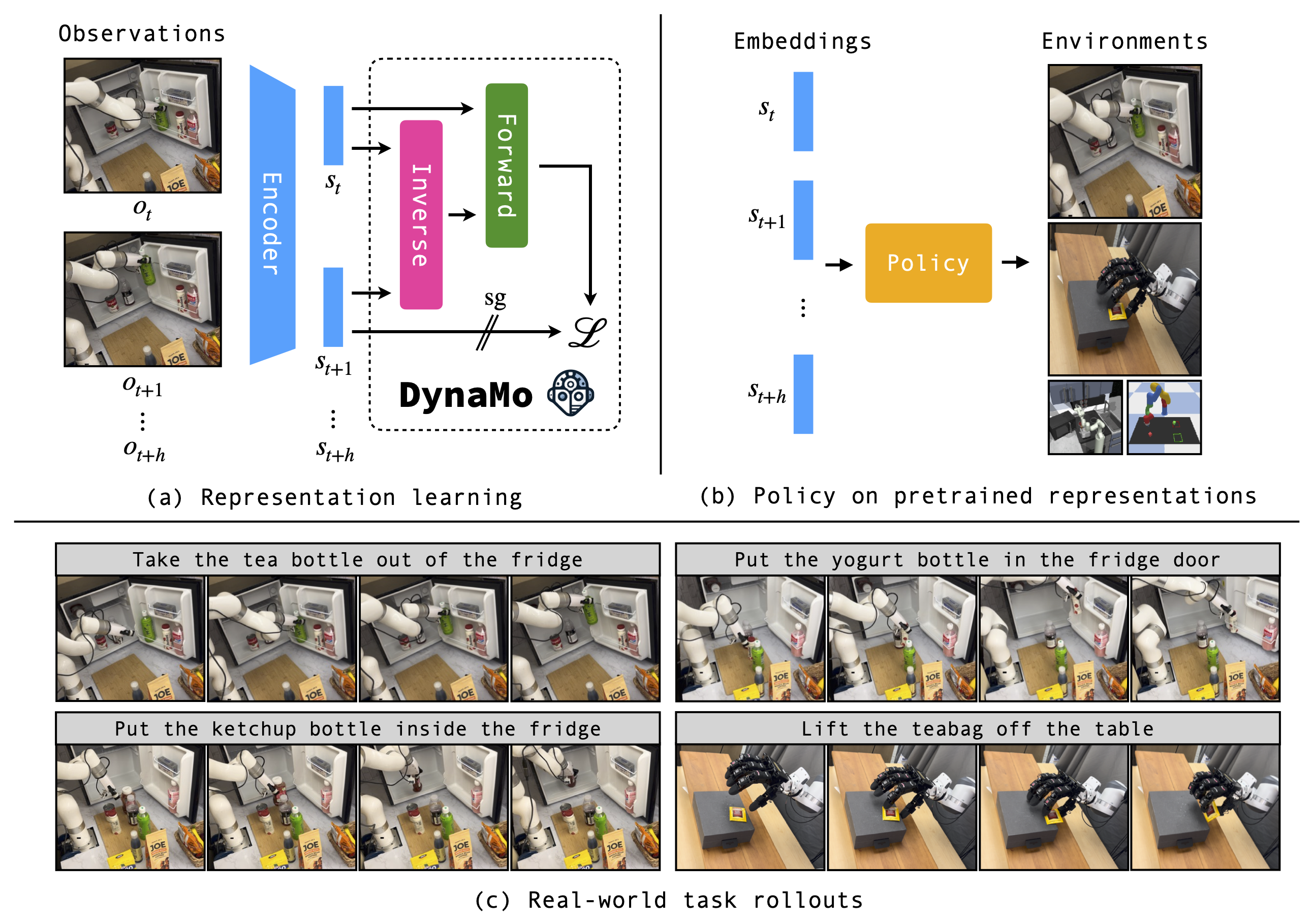
DynaMo: In-Domain Dynamics Pretraining for Visuo-Motor Control
Zichen Jeff Cui ,
Hengkai Pan ,
Aadhithya Iyer ,
Siddhant Haldar ,
Lerrel Pinto
NeurIPS 2024
project page
/
arXiv
/
code
OPEN TEACH: A Versatile Teleoperation System for Robotic Manipulation
Aadhithya Iyer ,
Zhuoran Peng ,
Yinlong Dai ,
Irmak Guzey ,
Siddhant Haldar ,
Soumith Chintala ,
Lerrel Pinto
CoRL 2024
project page
/
arXiv
/
code
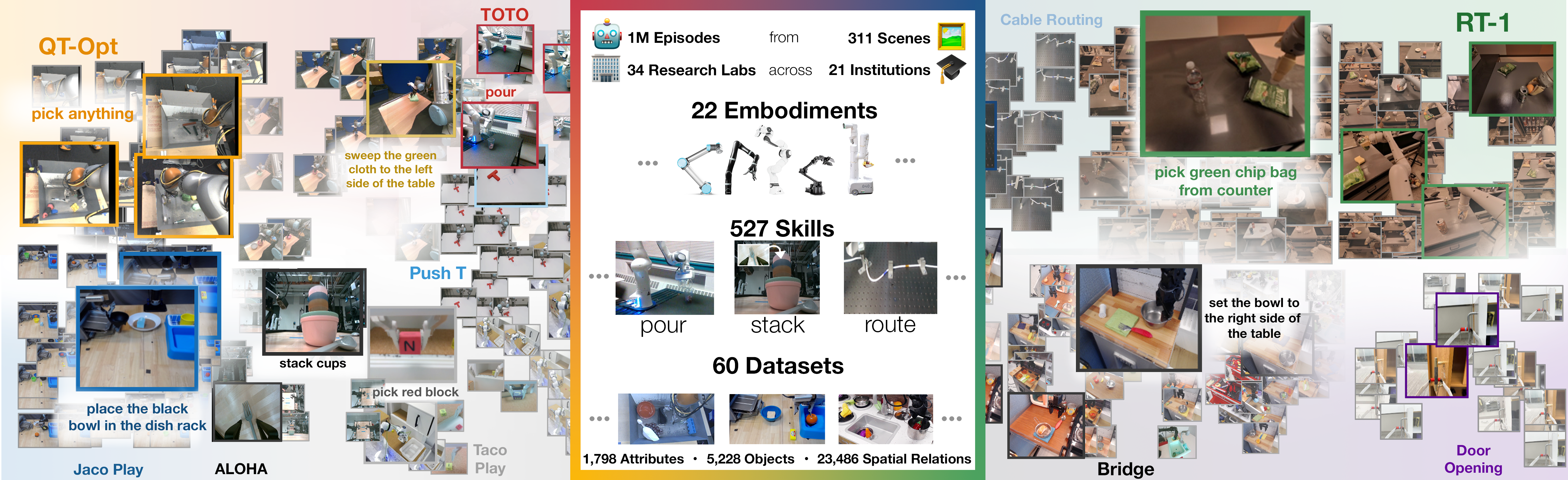
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
ICRA 2024 (Best Paper Award) project page
/
arXiv
/
code
PolyTask: Learning Unified Policies through Behavior Distillation
Siddhant Haldar ,
Lerrel Pinto
arXiv
project page
/
arXiv
/
code
Teach a Robot to FISH: Versatile Imitation from One Minute of Demonstrations
Siddhant Haldar* ,
Jyothish Pari* ,
Anant Rai ,
Lerrel Pinto
RSS 2023 (Best Student Paper Award) project page
/
arXiv
/
paper
/
code
Your browser does not support the video tag.
Watch and Match: Supercharging Imitation with Regularized Optimal Transport
Siddhant Haldar ,
Vaibhav Mathur ,
Denis Yarats ,
Lerrel Pinto
CoRL 2022 (Oral Presentation, Best Paper Award Finalist) project page
/
arXiv
/
paper
/
code
Your browser does not support the video tag.
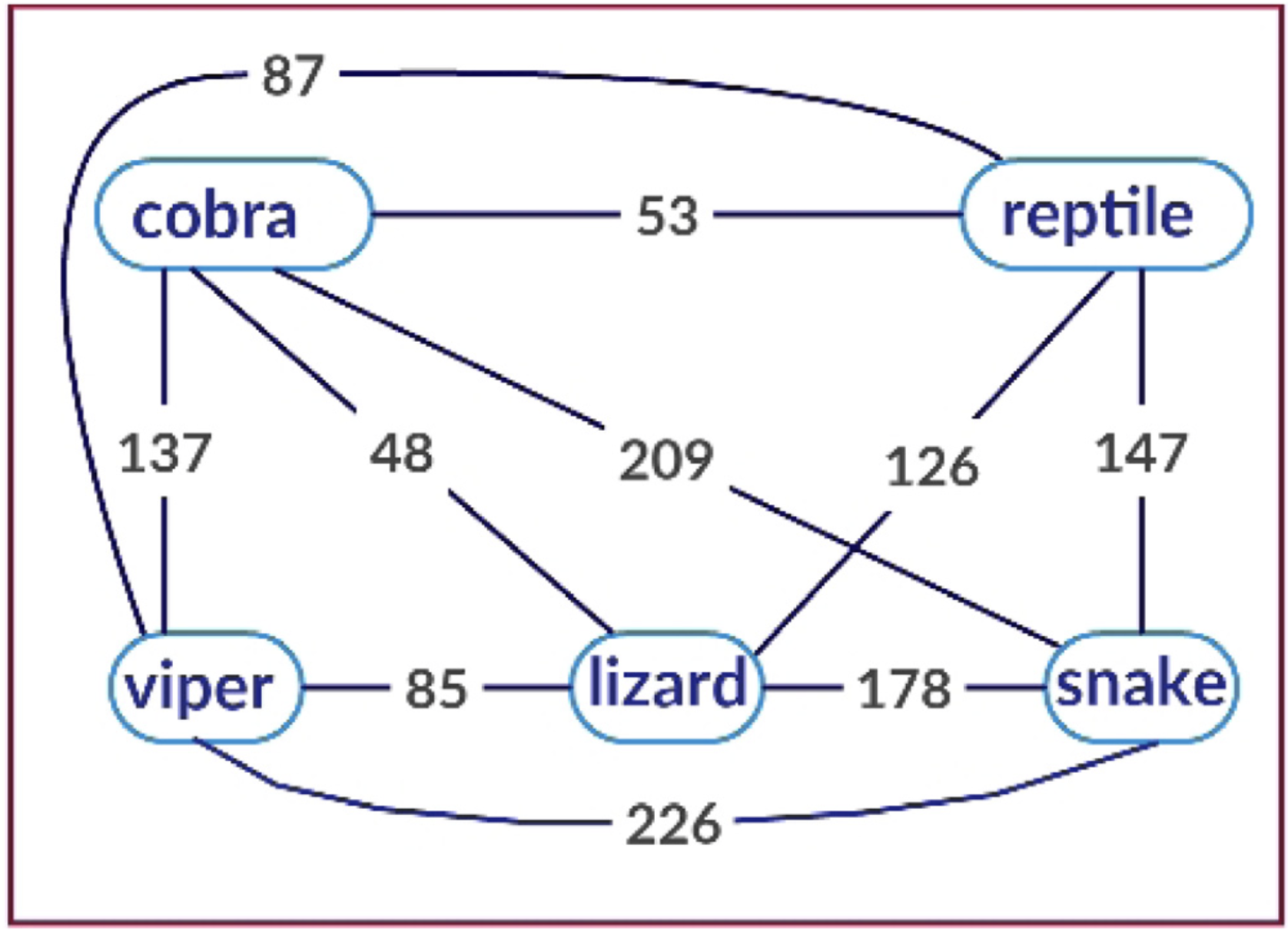
Network Embedding of Distributional Thesaurus Combined with Word Vectors Leads to Better Representation
Abhik Jana ,
Siddhant Haldar ,
Pawan Goyal
ESWA 2022
paper
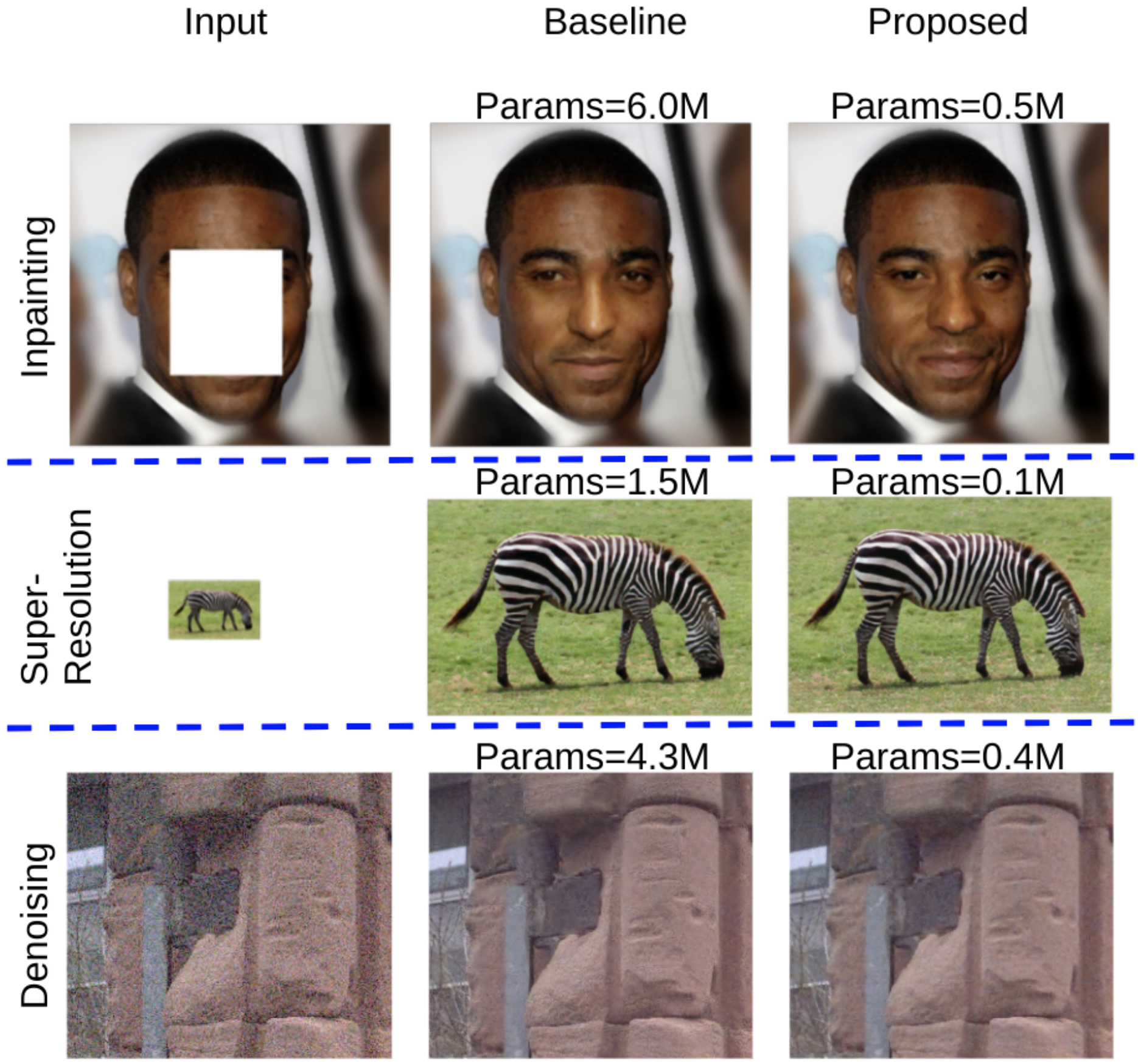
Lightweight Modules for Efficient Deep Learning based Image Restoration
Avisek Lahiri ,
Sourav Bairagya ,
Sutanu Bera ,
Siddhant Haldar ,
Prabir Kumar Biswas
TCSVT 2020
arXiv
/
code
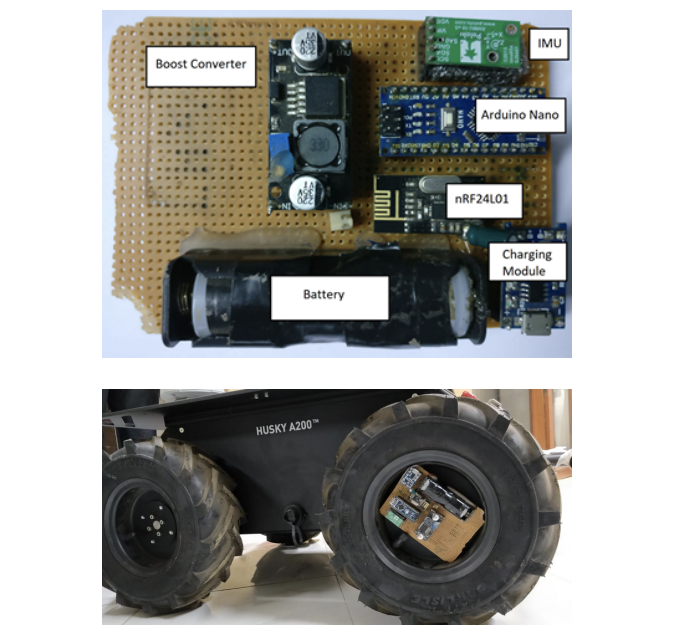
Design and Implementation of Autonomous Ground Vehicle for Constrained Environments
Siddhant Haldar et al
IRC 2019
paper
Your browser does not support the video tag.
Ground Vehicle Odometry using a Non-Intrusive Inertial Speed Sensor
Het Shah* ,
Siddhant Haldar* ,
Rohit Ner* ,
Siddharth Jha* ,
Debashish Chakravarty
ICIT 2019
arXiv
Your browser does not support the video tag.
Off-Road Lane Detection Using Superpixel Clustering And RANSAC Curve Fitting
Sanskar Agrawal* ,
Indu Kant Deo* ,
Siddhant Haldar* ,
G. Rahul Krantikiran* ,
Debashish Chakravarty
ICARCV 2018
paper